

















Invented by OpenAI, Dactyl represents a major step forward in the development of even more agile machines.
Who hasn’t kept a Rubik’s cube in their hands? This fun three-dimensional cube puzzle was created by Erno Rubik (a Hungarian) in 1974, and is considered the most popular game in the world. Many have tried to figure out how to solve this difficult pastime in the shape of a cube, but few have succeeded.
In this regard, it was necessary to intervene the science that, after years of research and using the algorithm of Kociemba (among the optimal solutions of the game under consideration), invented a real multipurpose device capable of getting there where not all humans can.
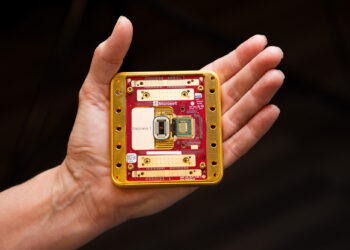
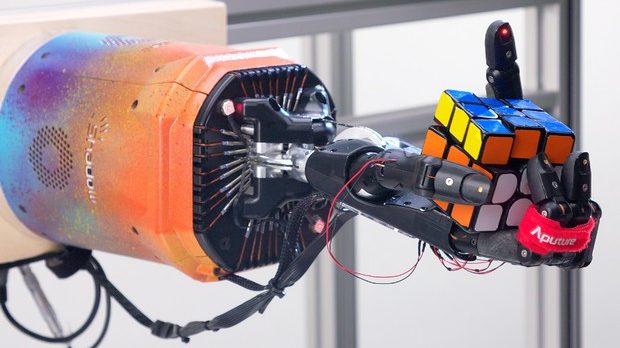
Specifically, the invention was baptized with the name of Dactyl, a robotic arm, created by the American non-profit organization for research on artificial intelligence, OpenAI, which proved able to solve the Rubik’s cube with one hand in 4 minutes thus providing an important and further step forward in the world of robotics. Dactyl moves quite slowly, but still manages to complete the task assigned to him by simply holding the cube on the palm of his hand and maneuvering it, even when hindered by objects and disorders of various kinds and, thanks to the update of the new softwer, the fingers of the robot have gone from being able to manipulate simple cubes to being able to make the micromovements necessary to rotate a single face of the Rubik’s cube while keeping firm the grip of the object.
The realization of this project stems from the idea of being able to train a robotic hand to perform tasks with complex manipulations, attitudes currently difficult to master for robots, as explains Matthias Plappert, head of the team of engineers at OpenAI:
“The ability of a robot to solve the Rubik’s cube is actually extremely difficult. You have to control your fingers precisely, you have to do it without making confusion, but many unexpected and different things can happen during this process“.