

















For the first time an arm has been designed that combines the rolling and adhesion properties of octopus tentacles
Nature is once again a source of inspiration for new and interesting technologies. The field of robotics is among those that benefit the most. In this case, the animal taken as an example is the octopus and its tentacles. A team of researchers from the School of Mechanical Engineering and Automation, Beihang University, and the John A. Paulson School of Engineering and Applied Sciences, Harvard University, developed a tentacle-shaped robotic arm.
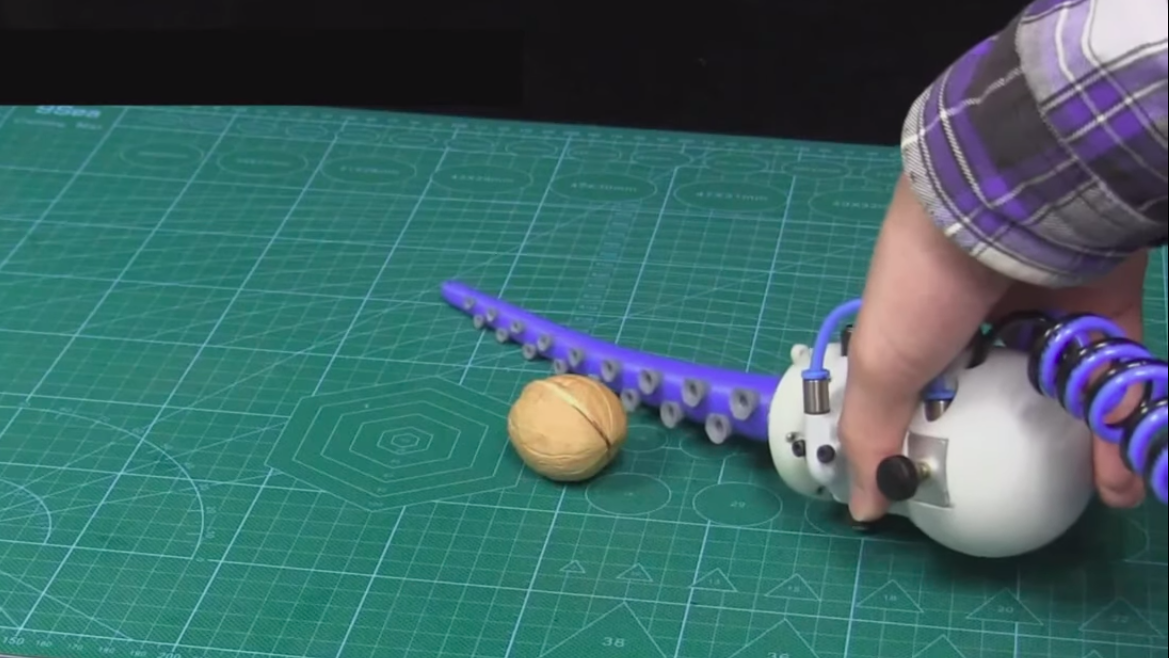
The work was published in the pages of Soft Robotics magazine. The arm combines for the first time the tapering and gripping properties of suction cups. The combination makes it possible to move and manipulate very different objects with various shapes, sizes and textures. The design allows the arm to roll up and get a solid but gentle grip on objects like a walnut or an egg. On the robotic tentacle there are also several suction cups that, thanks to the vacuum suctioned in, generate a very stable adhesion force that allows you to move objects larger than the arm.
The robotic arm is very similar to a real tentacle and fully mimics its properties. The new design can promote the creation of a new generation of “soft” arms suitable for a wide variety of objects. The invention also helps science to better understand the properties of octopus tentacles, incredible animals still not fully understood.