


















Performing emergency operations in the event of accidents or catastrophes is always a big problem, as has been shown following the Fukushimanuclear disaster, for example.
The answer comes from Robosimian, a robot designed to operate in extreme conditions, carried Out by Nasa‘s Jet Propulsion Laboratory . RoboSimian is able to walk both on two legs and on four, and is able to move on small wheels that allow him to evolve into very narrow spaces. In This robot there is, however, also a little ‘ of Italy.
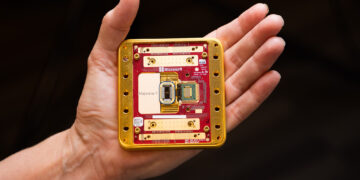
Some of the sensors that have been applied to one of the Robosimian arts. Limbs able to grasp even delicate objects without destroying them or dropping them, were developed following a research published in the journal Frontiers under Neurorobotics and conducted by High School Sant’Anna of Pisa and JPL of Nasa with the collaboration of theItalian Institute of Technology andCà Foscari University of Venice.

These sensors, based on fibre- Optictechnology, are used to make the artificial hand capable of perceiving the physical properties of the manipulated objects, thus rigidity, consistency and size of various Objects of different shapes and weights. The result of the Parlomaproject, funded By the Ministry of Education, University and Research and the Dubai Future Foundation, the sensors have been able to demonstrate the ability to accurately detect Main characteristics of the objects, managing to grasp them gently without breaking them or slipping them.
The capabilities of Robosimian, therefore, with this new parterre of sensors, will increase out of proportion. Born to interact with the human being and to act in extreme conditions, lifting heavy objects like rubble, for example, Robosimian can, from today, effectively control a wide variety of objects, thanks to the integration with the limb Artificial sensorized.