














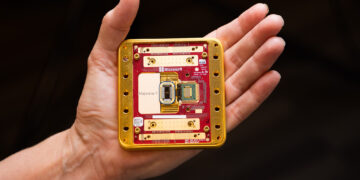






Researchers in Washington have designed a microcamera that can be installed like a backpack on the backs of insects and allows you to see how they do.
What does an insect see? This is a question that researchers and entomologists have been asking themselves for years. There are many (theoretical) studies on the ocular apparatus of flies, mosquitoes, bees and beetles but we still do not know exactly “how they see” these animals. A reliable answer could come from a project of the University of Washington. A team of researchers in computer science and engineering has designed a micro-camera that can be installed on the back of beetles. Like a backpack: in this way, it is possible to “see like insects” and understand the complex physiological mechanisms that regulate the movement, perception and flight of these tiny animals. The project was presented in the authoritative magazine “Science Mag” in the section dedicated to Robotics. According to the authors, in fact, the data collected could “help us to design increasingly sophisticated and miniaturized artificial systems, in view of very small robots that can really move independently, and maybe fly with precision as flies and bees do”.
You might also be interested in —> A new weapon against mosquitoes, here are the graphene clothes
American researchers create a “backpack-microcamera” for insects
In the abstract of the article “Wireless steerable vision for live insects and insect-scale robots”, the authors of the research explain that “vision serves as an essential sensory input for insects, but consumes considerable energy resources. The cost of supporting sensitive photoreceptors has led many insects to develop high visual acuity only in small regions of the retina and to evolve to move their visual systems independently of their body through head movement. By understanding the compromises made by insect vision systems in nature, we can design better vision systems for insect scale robotics to balance energy, computation and mass. Here, we report a fully wireless, autonomous and mechanically adjustable vision system that mimics head movement in a form factor small enough to be mounted on the back of a live beetle or similarly sized land robot. Our electronics and actuator weigh 248 milligrams and can drive the camera over 60° based on the controls of a smartphone. The camera transmits 160 pixels by 120 pixels of monochrome video at 1-5 frames per second (FPS) to a Bluetooth radio from a maximum distance of 120 meters. We have mounted this vision system on two species of beetles that walk freely live, demonstrating that the activation of image acquisition via an on-board accelerometer reaches operating times of up to 6 hours with a 10 milliamp battery per hour. We also built a small terrestrial robot (1.6 cm by 2 cm) that can move up to 3.5 cm per second, support vision and operate for 63-260 minutes. Our results show that adjustable vision can allow object tracking and wide-angle vision for 26 to 84 times less energy than the movement of the entire robot.
You might also be interested in —> Air Pix, the self-contained pocket self-drone